Simulation examples¶
These examples have simulation.
ledramp¶
Program:
from entrypoint2 import entrypoint
from path import path
from pysimavr.avr import Avr
from pysimavr.connect import connect_pins_by_rule
from pysimavrgui.examples.sim.avrsimmain import AvrSimMain
from pysimavr.firmware import Firmware
from pysimavrgui.compgame import CompositeGame
from pysimavrgui.infogame import InfoGame
from pysimavrgui.ledrowgame import LedRowGame
from pysimavr.ledrow import LedRow
from pysimavr.vcdfile import VcdFile
@entrypoint
def run_sim(vcdfile='ledramp.vcd', speed=0.1, fps=20, timeout=0.0, visible=1, image_file=''):
firmware = Firmware(path(__file__).dirname() / 'ledramp.elf')
avr = Avr(firmware, f_cpu=8000000, mcu='atmega48')
vcd = VcdFile(avr, period=1000, filename=vcdfile)
ledrow = LedRow(avr)
connect_pins_by_rule('''
avr.B0 ==> led.0 -> vcd
avr.B1 ==> led.1 -> vcd
avr.B2 ==> led.2 -> vcd
avr.B3 ==> led.3 -> vcd
avr.B4 ==> led.4 -> vcd
avr.B5 ==> led.5 -> vcd
avr.B6 ==> led.6 -> vcd
avr.B7 ==> led.7 -> vcd
''',
dict(
avr=avr,
led=ledrow,
),
vcd=vcd,
)
def state_func(i):
return (ledrow.pinstate(i), ledrow.reset_dirty(i))
led_game = LedRowGame(state_func=state_func,
labels=['B' + str(x) for x in range(8)])
dev = CompositeGame([
led_game,
InfoGame(avr),
])
scrshot_by_exit = [(dev, image_file)] if image_file else None
AvrSimMain(avr, dev, vcd, speed=speed, fps=fps, visible=visible, timeout=timeout,
scrshot_by_exit=scrshot_by_exit).run_game()
Starting program:
>>> from pysimavrgui.examples.sim.ledramp import run_sim
>>> run_sim(vcdfile='docs/ledramp.vcd', speed=0.1, timeout=0.2, fps=50, visible=0, image_file='docs/ledramp.png')
Loaded 1850 .text
Loaded 32 .data
Starting atmega48 - flashend 0fff ramend 02ff e2end 00ff
atmega48 init
avr_timer_reconfigure-2 clock turned off
avr_timer_configure-2 TOP 4096.00Hz = 1953 cycles
avr_timer_write_ocr-2 mode 2 UNSUPPORTED
avr_timer_configure-2 TOP 64.00Hz = 125000 cycles
avr_timer_configure-2 A 64.00Hz = 125000 cycles
GUI:
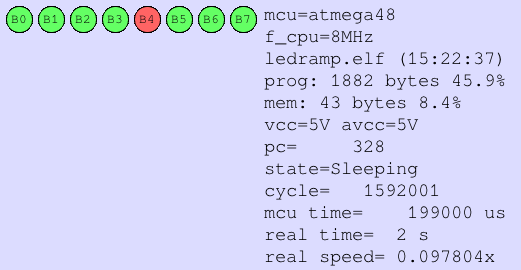
Signals:

LCD¶
Program:
from entrypoint2 import entrypoint
from path import path
from pysimavr.ac import Ac
from pysimavr.avr import Avr
from pysimavr.connect import connect_pins_by_rule
from pysimavrgui.examples.sim.avrsimmain import AvrSimMain
from pysimavr.firmware import Firmware
from pysimavrgui.compgame import CompositeGame
from pysimavrgui.infogame import InfoGame
from pysimavrgui.lcdgame import LcdGame
from pysimavrgui.ledrowgame import LedRowGame
from pysimavr.lcd import Lcd
from pysimavr.ledrow import LedRow
from pysimavr.vcdfile import VcdFile
@entrypoint
def run_sim(vcdfile='lcd.vcd', speed=0.1, fps=20, timeout=0.0, visible=1, image_file=''):
firmware = Firmware(path(__file__).dirname() / 'lcd.elf')
avr = Avr(firmware,f_cpu=16000000)
lcd = Lcd(avr)
ledrow = LedRow(avr, size=7)
# period=1000 -> vcd error
vcd = VcdFile(avr, period=10, filename=vcdfile)
def state_func(i):
return (ledrow.pinstate(i), ledrow.reset_dirty(i))
led_game = LedRowGame(state_func=state_func,
labels='D4 D5 D6 D7 RS E RW'.split()
)
ac = Ac(avr)
connect_pins_by_rule('''
avr.B0 <=> lcd.D4 -> vcd
avr.B1 <=> lcd.D5 -> vcd
avr.B2 <=> lcd.D6 -> vcd
avr.B3 <=> lcd.D7 -> vcd
avr.B4 ==> lcd.RS -> vcd
avr.B5 ==> lcd.E -> vcd
avr.B6 ==> lcd.RW -> vcd
vcd <- ac.OUT -> avr.D2
lcd.D4 -> led.0
lcd.D5 -> led.1
lcd.D6 -> led.2
lcd.D7 -> led.3
lcd.RS -> led.4
lcd.E -> led.5
lcd.RW -> led.6
''',
dict(
avr=avr,
led=ledrow,
lcd=lcd,
ac=ac
),
vcd=vcd,
)
dev = CompositeGame([
CompositeGame(
[LcdGame(lambda x, y:lcd.get_char(x, y), (20, 2)),
led_game,
],
align=1),
InfoGame(avr),
])
scrshot_by_exit = [(dev, image_file)] if image_file else None
AvrSimMain(avr, dev, vcd, speed=speed, fps=fps, visible=visible, timeout=timeout,
scrshot_by_exit=scrshot_by_exit).run_game()
Starting program:
>>> from pysimavrgui.examples.sim.lcd import run_sim
>>> run_sim(vcdfile='docs/lcd.vcd', speed=1, timeout=0.2, fps=50, visible=0, image_file='docs/lcd.png')
Loaded 2112 .text
Loaded 14 .data
Starting atmega48 - flashend 0fff ramend 02ff e2end 00ff
atmega48 init
LCD: 37uS is 592 cycles for your AVR
LCD: 1uS is 16 cycles for your AVR
ac_input_init period 2000uS or 32000 cycles
hd44780_write_command 33
hd44780_write_command 30
hd44780_process_write command 20 write when still BUSY
hd44780_write_command 20
hd44780_write_command activating 4 bits mode
hd44780_write_command 28
hd44780_write_command 08
hd44780_write_command 01
hd44780_write_command 06
hd44780_write_command 0e
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 31
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 32
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 33
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 34
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 35
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 36
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 37
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 38
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 39
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 30
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 31
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 32
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 33
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 34
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 35
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 36
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 37
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 38
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 31
hd44780_write_data 39
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 32
hd44780_write_data 30
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 32
hd44780_write_data 31
hd44780_write_command 01
hd44780_write_command 84
hd44780_write_data 20
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 30
hd44780_write_data 30
hd44780_write_data 3a
hd44780_write_data 32
hd44780_write_data 32
GUI:
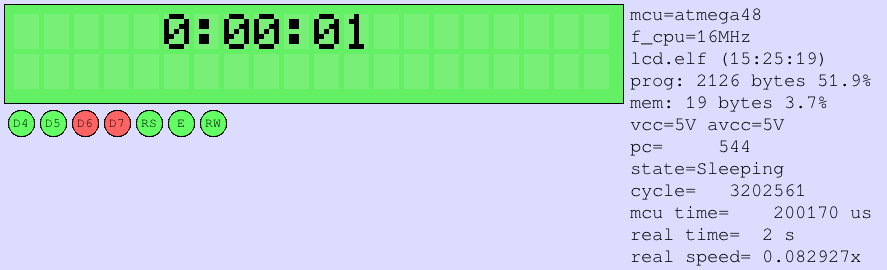
Signals:

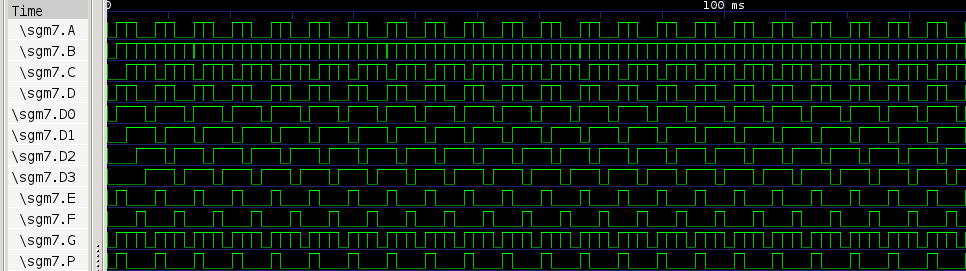
seven segment display¶
Program:
from entrypoint2 import entrypoint
from path import path
from pysimavr.avr import Avr
from pysimavr.connect import connect_pins_by_rule
from pysimavrgui.examples.sim.avrsimmain import AvrSimMain
from pysimavr.firmware import Firmware
from pysimavrgui.compgame import CompositeGame
from pysimavrgui.infogame import InfoGame
from pysimavrgui.ledrowgame import LedRowGame
from pysimavrgui.sgm7game import Sgm7Game
from pysimavr.inverter import Inverter
from pysimavr.ledrow import LedRow
from pysimavr.sgm7 import Sgm7
from pysimavr.vcdfile import VcdFile
@entrypoint
def run_sim(vcdfile='sgm7.vcd', speed=0.001, fps=20, timeout=0.0, visible=1, image_file=''):
firmware = Firmware(path(__file__).dirname() / 'sgm7.elf')
firmware.f_cpu = 8000000
firmware.mcu = "atmega168"
avr = Avr(firmware)
vcd = VcdFile(avr, period=1000, filename=vcdfile)
####################################################
# ledrow
ledrow = LedRow(avr, size=12)
####################################################
# ledrow game
def state_func_seg(i):
return (ledrow.pinstate(i), ledrow.reset_dirty(i))
led_game_seg = LedRowGame(state_func=state_func_seg,
disp_size=8,
labels=['B' + str(x) for x in range(8)]
)
def state_func_dig(i):
return (ledrow.pinstate(i + 8), ledrow.reset_dirty(i + 8))
led_game_dig = LedRowGame(state_func=state_func_dig,
disp_size=4,
labels=['C' + str(x) for x in range(4)])
####################################################
# sgm7
sgm7 = Sgm7(avr, size=4)
inv = [Inverter(avr) for x in range(4)]
connect_pins_by_rule('''
ledrow.0 <== avr.B0 ==> sgm7.A -> vcd
ledrow.1 <== avr.B1 ==> sgm7.B -> vcd
ledrow.2 <== avr.B2 ==> sgm7.C -> vcd
ledrow.3 <== avr.B3 ==> sgm7.D -> vcd
ledrow.4 <== avr.B4 ==> sgm7.E -> vcd
ledrow.5 <== avr.B5 ==> sgm7.F -> vcd
ledrow.6 <== avr.B6 ==> sgm7.G -> vcd
ledrow.7 <== avr.B7 ==> sgm7.P -> vcd
ledrow.8 <== avr.C0 ==> inv0.IN | inv0.OUT -> sgm7.D0 -> vcd
ledrow.9 <== avr.C1 ==> inv1.IN | inv1.OUT -> sgm7.D1 -> vcd
ledrow.10<== avr.C2 ==> inv2.IN | inv2.OUT -> sgm7.D2 -> vcd
ledrow.11<== avr.C3 ==> inv3.IN | inv3.OUT -> sgm7.D3 -> vcd
''',
dict(
avr=avr,
sgm7=sgm7,
ledrow=ledrow,
inv0=inv[0],
inv1=inv[1],
inv2=inv[2],
inv3=inv[3],
),
vcd=vcd,
)
####################################################
# sgm7 game
def segments_func(digit_index):
return (sgm7.digit_segments(digit_index), sgm7.reset_dirty(digit_index))
sgm7_game = Sgm7Game(segments_func=segments_func, disp_size=4)
####################################################
# compose game
dev = CompositeGame([
CompositeGame(
[
sgm7_game,
led_game_seg,
led_game_dig,
],
align=1),
InfoGame(avr),
])
scrshot_by_exit = [(dev, image_file)] if image_file else None
AvrSimMain(avr, dev, vcd, speed=speed, fps=fps, visible=visible, timeout=timeout,
scrshot_by_exit=scrshot_by_exit).run_game()
Starting program:
>>> from pysimavrgui.examples.sim.sgm7 import run_sim
>>> run_sim(vcdfile='docs/sgm7.vcd', speed=1, timeout=0.1, fps=50, visible=0, image_file='docs/sgm7.png')
Loaded 680 .text
Loaded 6 .data
Starting atmega168 - flashend 3fff ramend 04ff e2end 01ff
atmega168 init
avr_timer_reconfigure-1 clock turned off
avr_timer_write_ocr-1 mode 0 UNSUPPORTED
avr_timer_reconfigure-1 clock turned off
avr_timer_configure-1 TOP 639.80Hz = 12503 cycles
avr_timer_configure-1 A 639.80Hz = 12503 cycles
GUI:
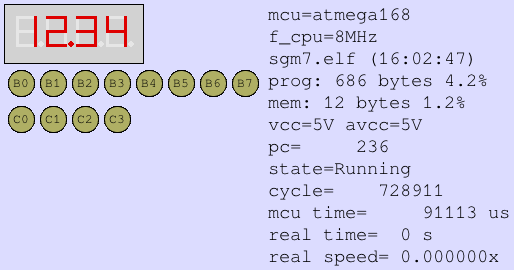
Signals: